News
Research Presented at HRI 2025 in Melbourne
Professor Kazunori Terada presented our latest research on robot explanation models at the 2025 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2025), held in Melbourne, Australia from March 10-13, 2025.
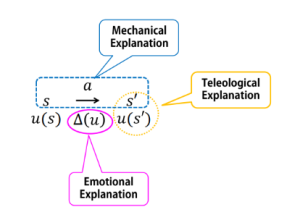
The poster presentation, titled “A Theoretical Integration of Robot Explanations: From Mechanical and Teleological to Emotional Explanations,” introduced a comprehensive framework that unifies different approaches to how robots can explain their behavior to humans. This work bridges the gap between mechanical explanations (how robots function), teleological explanations (robots’ goals and intentions), and the emerging field of emotional explanations in human-robot interaction.
Author: Kazunori Terada
Citation: Terada, K. (2025). A Theoretical Integration of Robot Explanations: From Mechanical and Teleological to Emotional Explanations. In Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’25), pp. 1675-1679.